Method of navigation for an unmanned aerial vehicle based on a single estimate of its spatial position and intrinsic angular measurements
DOI:
https://doi.org/10.3103/S0735272714030029Keywords:
method of navigation, unmanned aerial vehicle, active radio beacon, identification of motion modelAbstract
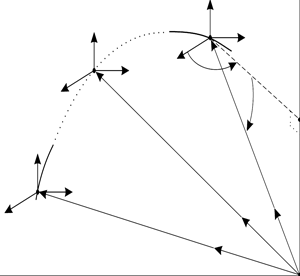
An alternative method for solving the problem of navigation of unmanned aerial vehicle has been developed; this unmanned aerial vehicle is equipped with airborne direction finder using a radio beacon with known spatial position under conditions of the absence of data having adequate precision and obtained from satellite navigation systems.References
- SOKOLOV S.V.; POLOVINCHUK, N.Y. Theoretical Principles of the Synthesis of Self-Contained Noise-Immune Strapdown Inertial Navigation Systems. MO RF, 1998 [in Russian].
- STEPANOV D.N.; TISHCHENKO, I.P. The problem of modeling the flight unmanned aerial vehicle based on vision systems. Programmnye Sistemy: Teoriya i Prilozheniya, v.2, n.4, p.33-43, 2011, http://psta.psiras.ru/read/psta2011_4_33-43.pdf.
- ARDENTOV, A.A.; BESCHASTNY, I.Y.; MASHTAKOV, A.P.; POPOV, A.Y.; SACHKOV, Y.L.; SACHKOVA, E.F. Algorithms for evaluation position and orientation of UAV. Programmnye Sistemy: Teoriya i Prilozheniya, v.3, n.3, p.23-39, 2012, http://psta.psiras.ru/read/psta2012_3_23-39.pdf.
- ZHDANYUK, B.F. Basics of the Statistical Processing of Trajectory Measurements. Moscow: Sov. Radio, 1978 [in Russian]. 384 p.
- MUDROV, V.I.; KUSHKO, V.P. Measurement Processing Methods: Quasi-Likelihood Estimates. Moscow: Radio i Svyaz’, 1983 [in Russian]. 304 p.
- BULYCHEV, Y.G.; BURLAI, I.V. Direction finding under conditions of a priori uncertainty. Izv. RAN. Teoriya i Sistemy Upravleniya, n.5, p.46-51, 2002.
Downloads
Published
2014-03-17
Issue
Section
Research Articles